Pose Classification
Table of contents
Overview
One of the applications BlazePose can enable is fitness. More specifically - pose classification and repetition counting. In this section we’ll provide basic guidance on building a custom pose classifier with the help of Colabs and wrap it in a simple fitness demo within ML Kit quickstart app. Push-ups and squats are used for demonstration purposes as the most common exercises.
 |
|---|
| Fig 1. Pose classification and repetition counting with MediaPipe Pose. |
We picked the k-nearest neighbors algorithm (k-NN) as the classifier. It’s simple and easy to start with. The algorithm determines the object’s class based on the closest samples in the training set.
To build it, one needs to:
- Collect image samples of the target exercises and run pose prediction on them,
- Convert obtained pose landmarks to a representation suitable for the k-NN classifier and form a training set using these Colabs,
- Perform the classification itself followed by repetition counting (e.g., in the ML Kit quickstart app).
Training Set
To build a good classifier appropriate samples should be collected for the training set: about a few hundred samples for each terminal state of each exercise (e.g., “up” and “down” positions for push-ups). It’s important that collected samples cover different camera angles, environment conditions, body shapes, and exercise variations.
 |
|---|
| Fig 2. Two terminal states of push-ups. |
To transform samples into a k-NN classifier training set, both Pose Classification Colab (Basic) and Pose Classification Colab (Extended) could be used. They use the Python Solution API to run the BlazePose models on given images and dump predicted pose landmarks to a CSV file. Additionally, the Pose Classification Colab (Extended) provides useful tools to find outliers (e.g., wrongly predicted poses) and underrepresented classes (e.g., not covering all camera angles) by classifying each sample against the entire training set. After that, you’ll be able to test the classifier on an arbitrary video right in the Colab.
Classification
Code of the classifier is available both in the Pose Classification Colab (Extended) and in the ML Kit quickstart app. Please refer to them for details of the approach described below.
The k-NN algorithm used for pose classification requires a feature vector representation of each sample and a metric to compute the distance between two such vectors to find the nearest pose samples to a target one.
To convert pose landmarks to a feature vector, we use pairwise distances between predefined lists of pose joints, such as distances between wrist and shoulder, ankle and hip, and two wrists. Since the algorithm relies on distances, all poses are normalized to have the same torso size and vertical torso orientation before the conversion.
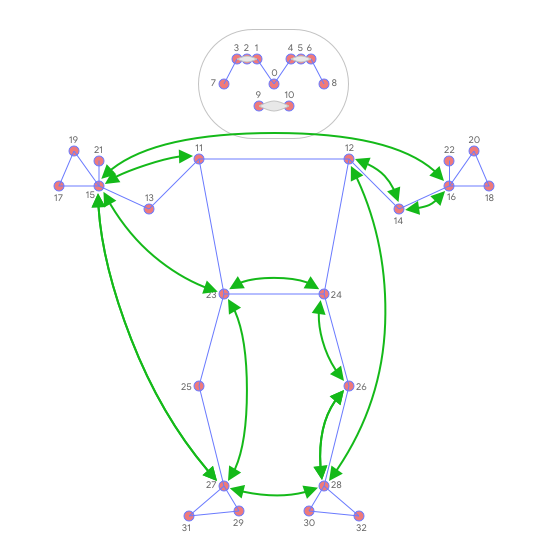 |
|---|
| Fig 3. Main pairwise distances used for the pose feature vector. |
To get a better classification result, k-NN search is invoked twice with different distance metrics:
- First, to filter out samples that are almost the same as the target one but have only a few different values in the feature vector (which means differently bent joints and thus other pose class), minimum per-coordinate distance is used as distance metric,
- Then average per-coordinate distance is used to find the nearest pose cluster among those from the first search.
Finally, we apply exponential moving average (EMA) smoothing to level any noise from pose prediction or classification. To do that, we search not only for the nearest pose cluster, but we calculate a probability for each of them and use it for smoothing over time.
Repetition Counting
To count the repetitions, the algorithm monitors the probability of a target pose class. Let’s take push-ups with its “up” and “down” terminal states:
- When the probability of the “down” pose class passes a certain threshold for the first time, the algorithm marks that the “down” pose class is entered.
- Once the probability drops below the threshold, the algorithm marks that the “down” pose class has been exited and increases the counter.
To avoid cases when the probability fluctuates around the threshold (e.g., when the user pauses between “up” and “down” states) causing phantom counts, the threshold used to detect when the state is exited is actually slightly lower than the one used to detect when the state is entered. It creates an interval where the pose class and the counter can’t be changed.
Future Work
We are actively working on improving BlazePose GHUM 3D’s Z prediction. It will allow us to use joint angles in the feature vectors, which are more natural and easier to configure (although distances can still be useful to detect touches between body parts) and to perform rotation normalization of poses and reduce the number of camera angles required for accurate k-NN classification.